English
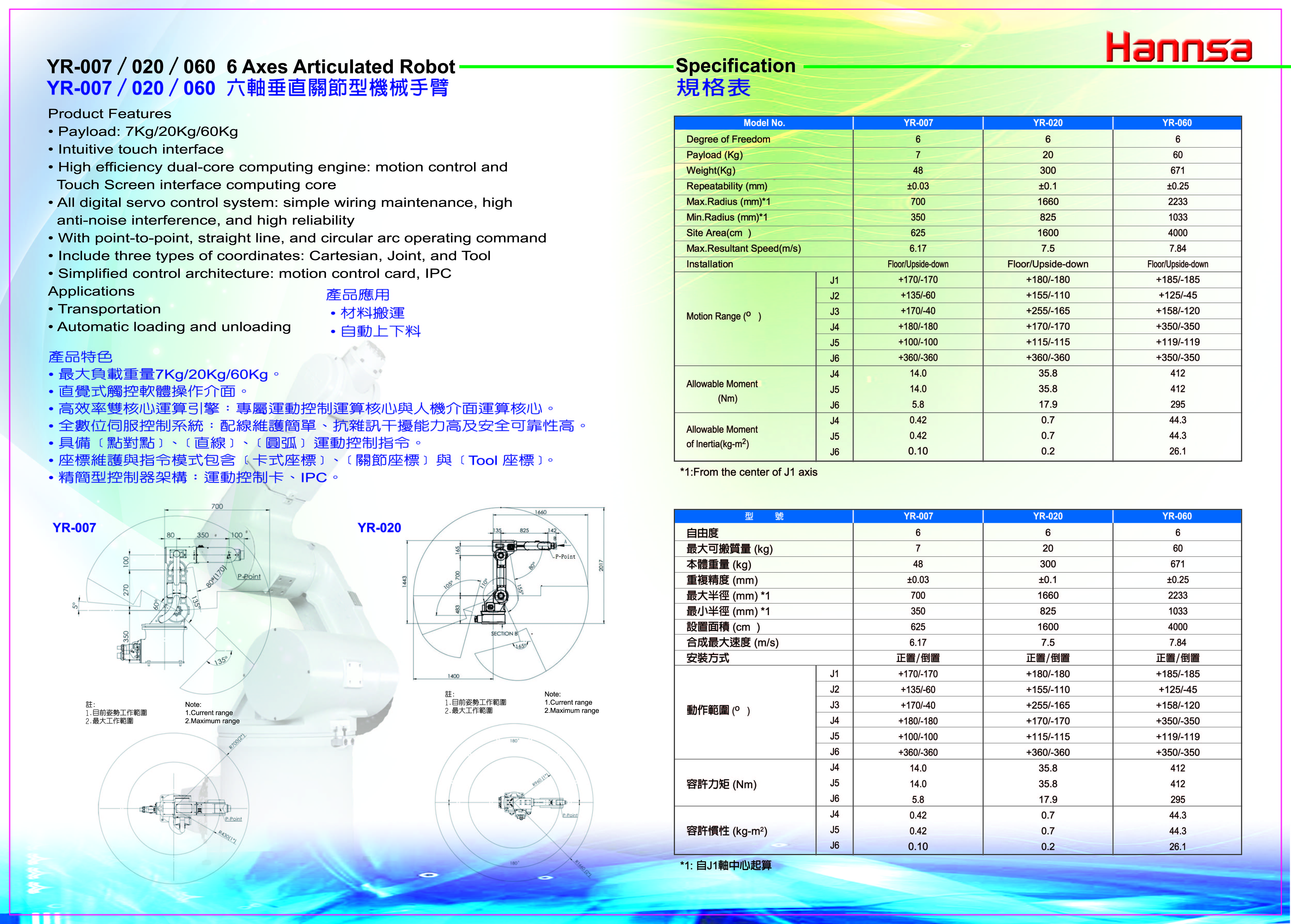
English6축 수직 관절형 기계 팔 | 대만 고품질 6축 수직 관절형 로봇 팔 제조업체 | 穎漢科技股份有限公司(YLM)
穎漢科技股份有限公司(YLM)은 대만의 전문 제조업체로, 6축 수직 관절형 로봇 팔을 제조하고 6축 수직 관절형 로봇 팔 서비스를 제공하는 우수한 업체입니다(穎漢科技股份有限公司(YLM)은 1976년에 설립되었습니다). 전 시리즈 전기/유전 CNC, NC, CR 스마트 파이프 벤딩 머신, 파이프 가공 기계 및 자동화 연구 개발 통합 전문 제조업체입니다.